Human Robot Parts: A Comprehensive Guide to Humanoid Robot Components, Materials, Manufacturing, and CNC Machining
Humanoid robots are rapidly transforming industries such as manufacturing, logistics, healthcare, retail, and service automation. Companies around the world are investing billions into humanoid robotics development, creating a growing demand for high-precision human robot parts. Many of these components require advanced CNC machining, precision assembly, and strict quality control to achieve the reliability and performance expected in modern robotic systems.
This article explores the most important humanoid robot parts, their functions, manufacturing methods, materials, and engineering challenges.
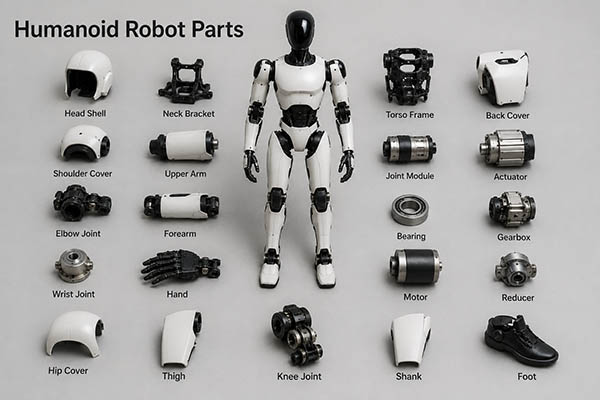
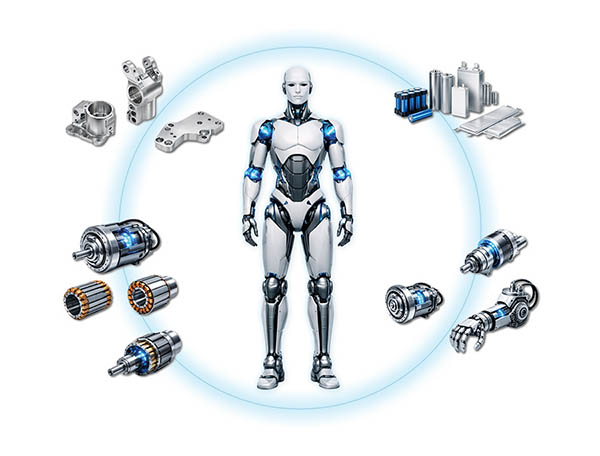
1. Structural Frame and Robotic Skeleton Components
The structural frame acts as the robot’s skeleton. It supports all electronic, mechanical, and power systems while maintaining rigidity and minimizing weight.
Common structural parts include:
| Component | Function |
|---|---|
| Main torso frame | Supports internal electronics |
| Hip structures | Connect upper and lower body |
| Leg frames | Support locomotion |
| Arm structures | Carry payloads and tools |
| Mounting brackets | Connect modules |
Most manufacturers prefer lightweight materials such as:
| Material | Density (g/cm³) | Strength |
|---|---|---|
| Aluminum 6061 | 2.7 | Good |
| Aluminum 7075 | 2.8 | Excellent |
| Titanium Ti-6Al-4V | 4.43 | Outstanding |
| Carbon Fiber Composite | 1.6 | Excellent |
Aluminum 7075 is commonly used because it offers nearly steel-like strength while reducing overall robot weight significantly. CNC milling is the primary manufacturing method for these components.
Typical CNC Requirements
- Tolerance: ±0.02 mm
- Surface roughness: Ra 1.6 μm
- Weight optimization through pocket machining
- Precision hole positioning for assembly
2. Joint Actuator Housings
Joint actuators function as the robot’s muscles.
Every major joint requires an actuator module:
- Shoulder
- Elbow
- Wrist
- Hip
- Knee
- Ankle
These housings contain:
- Electric motors
- Gear reducers
- Bearings
- Encoders
- Torque sensors
The housing must maintain alignment under continuous dynamic loads.
Example:
| Joint | Typical Torque |
|---|---|
| Wrist | 10-30 Nm |
| Elbow | 30-80 Nm |
| Shoulder | 80-200 Nm |
| Hip | 150-400 Nm |
| Knee | 150-500 Nm |
Because actuator alignment directly impacts robot accuracy, CNC machining tolerances often reach ±0.01 mm.
Actuator Module Internal Structure
A modern humanoid actuator often contains:
- Brushless DC Motor
- Harmonic Drive Gearbox
- Torque Sensor
- Encoder
- Bearing Set
- Controller
- Aluminum Housing
Industry analysis suggests actuators are among the most expensive parts of a humanoid robot, often representing a majority of hardware cost.
3. Precision Gearboxes and Harmonic Drives
Humanoid robots need high torque and precise movement.
Motors rotate at high speed but relatively low torque. Gearboxes convert this speed into usable force.
Popular gearbox technologies:
| Type | Advantages |
|---|---|
| Harmonic Drive | High precision |
| Cycloidal Drive | High shock resistance |
| Planetary Gearbox | Cost-effective |
Typical reduction ratios:
- 50:1
- 80:1
- 100:1
- 160:1
High-end humanoid robots often use harmonic drives because backlash can be reduced to nearly zero.
A gearbox error of only 0.1° may significantly affect balance during walking and object manipulation.
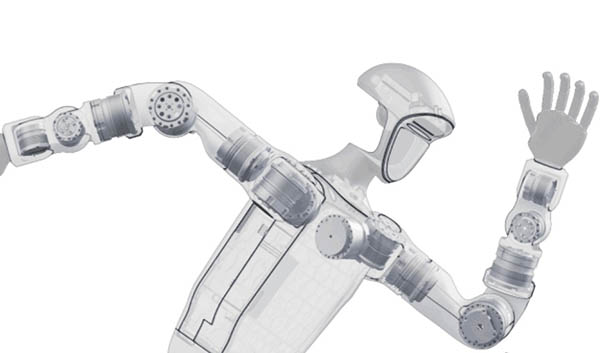
4. Bearings and Rotary Joint Assemblies
Bearings allow smooth movement while supporting loads.
Common bearing types include:
| Bearing Type | Application |
|---|---|
| Cross Roller Bearing | Shoulder joints |
| Angular Contact Bearing | High-speed rotation |
| Deep Groove Bearing | General use |
| Thin Section Bearing | Compact designs |
Cross roller bearings are particularly popular in humanoid robots because they support:
- Axial loads
- Radial loads
- Moment loads
Using a single bearing often reduces system complexity and weight.
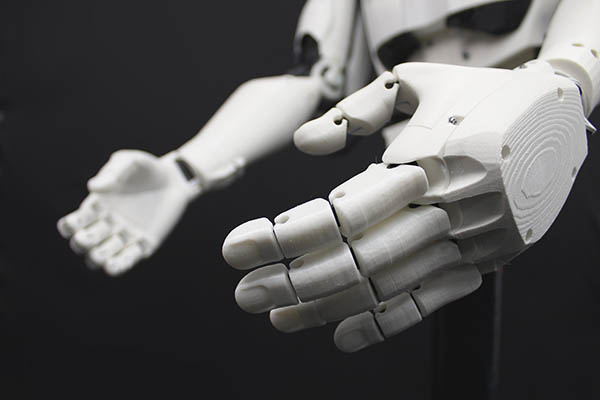
5. Robotic Hands and Finger Components
Robotic hands remain one of the most challenging areas of humanoid robotics.
Human hands contain:
- 27 bones
- Over 20 degrees of freedom
Advanced robotic hands may include:
| Component | Quantity |
|---|---|
| Finger joints | 15-20 |
| Mini actuators | 10-20 |
| Force sensors | 20+ |
| Encoders | 15+ |
Current humanoid robots still struggle to match human dexterity.
Tasks such as:
- Picking up eggs
- Folding clothes
- Buttoning shirts
remain difficult because finger mechanisms require extremely compact and precise components.
6. Sensor Systems
Sensors provide environmental awareness.
Without sensors, a humanoid robot cannot maintain balance or interact intelligently.
Key sensors include:
| Sensor | Function |
|---|---|
| Camera | Vision |
| LiDAR | Mapping |
| IMU | Balance |
| Force Sensor | Contact detection |
| Tactile Sensor | Touch feedback |
| Microphone | Voice input |
A humanoid robot may process thousands of sensor readings every second.
For example:
- IMU update rate: 1000 Hz
- Encoder feedback: 5000 Hz
- Vision systems: 30-120 FPS
These sensors act as the robot’s eyes, ears, and skin.
7. AI Controller and Computing Hardware
The controller acts as the robot’s brain.
Main responsibilities:
- Motion planning
- Object recognition
- Navigation
- Balance control
- Human interaction
Typical computing architecture:
| Layer | Hardware |
|---|---|
| High-Level AI | GPU |
| Motion Planning | CPU |
| Real-Time Control | MCU |
| Sensor Interface | Embedded Controller |
Modern humanoid robots may contain multiple processors working simultaneously.
This architecture enables real-time decision making and coordination across dozens of joints.
8. Battery Systems and Power Modules
Power density is one of the biggest limitations of humanoid robots.
Typical battery specifications:
| Parameter | Value |
|---|---|
| Voltage | 48V |
| Capacity | 1-3 kWh |
| Runtime | 2-8 hours |
Key battery components:
- Battery housing
- Cooling plates
- BMS modules
- Connectors
- Power distribution units
Many battery enclosures are CNC machined from aluminum for lightweight thermal management.
9. End Effectors and Grippers
While humanoid hands are ideal for human-like interaction, specialized grippers remain important.
Common gripper types:
| Type | Application |
|---|---|
| Two-finger gripper | Assembly |
| Vacuum gripper | Packaging |
| Soft gripper | Food handling |
| Adaptive gripper | Mixed objects |
Many industrial humanoid robots combine robotic hands with specialized end-effectors depending on the task.
10. Wiring, Cable Management, and Connectors
A humanoid robot can contain:
- Hundreds of wires
- Dozens of communication buses
- Multiple power networks
Important components include:
- Cable chains
- Routing channels
- Shielded connectors
- Flexible harnesses
Poor cable management often causes premature failures.
Therefore, engineers design internal routing paths during the earliest CAD development stages.
11. Lightweight Materials for Humanoid Robots
Material selection directly affects:
- Speed
- Battery life
- Payload
- Reliability
Common materials:
| Material | Typical Use |
|---|---|
| Aluminum 7075 | Structural parts |
| Titanium | Critical joints |
| Stainless Steel | Shafts and gears |
| Carbon Fiber | Covers and limbs |
| Engineering Plastics | Lightweight housings |
A 10% reduction in robot weight can significantly improve energy efficiency and walking performance.
12. CNC Machining Technologies Used for Human Robot Parts
Most critical humanoid robot parts require CNC machining.
Common processes include:
CNC Milling
Used for:
- Frames
- Housings
- Brackets
- Structural components
CNC Turning
Used for:
- Shafts
- Bushings
- Bearing seats
5-Axis CNC Machining
Used for:
- Complex actuator housings
- Lightweight topology-optimized parts
- Precision robotic joints
Typical robotic machining tolerances:
| Component | Tolerance |
|---|---|
| Structural Frame | ±0.05 mm |
| Bearing Bore | ±0.01 mm |
| Actuator Housing | ±0.01 mm |
| Gearbox Housing | ±0.005 mm |
Precision machining remains one of the foundational technologies enabling humanoid robotics.
13. Future Trends in Human Robot Parts
Several emerging technologies are reshaping humanoid robot design:
- Series Elastic Actuators (SEA)
- Artificial Muscles
- Structural Elastic Components
- Smart Skins
- Soft Robotics
- Modular Joint Systems
Research robots are already experimenting with flexible structures and compliant materials that improve impact resistance and energy efficiency.
14. Manufacturing Challenges for Humanoid Robot Components
Major engineering challenges include:
- Weight reduction
- Heat dissipation
- Battery limitations
- Precision assembly
- Cost reduction
- Reliability improvement
The industry’s largest bottleneck is often actuator manufacturing, where precision mechanics, electronics, sensors, and software must work together seamlessly.
15. Why Precision CNC Machining Is Critical for Humanoid Robots
Humanoid robots demand:
- High repeatability
- Tight tolerances
- Lightweight construction
- Long service life
Even small dimensional errors can affect:
- Walking stability
- Manipulation accuracy
- Sensor calibration
- Joint efficiency
For this reason, CNC machining remains the preferred manufacturing process for critical humanoid robot parts across the industry.
Why Choose Xavier for Human Robot Parts Manufacturing?
As humanoid robots continue expanding into manufacturing, logistics, healthcare, and service industries, the demand for high-precision robot components will grow dramatically. Companies developing humanoid systems require suppliers capable of delivering complex CNC machined parts with tight tolerances, excellent surface finishes, and consistent quality.
Xavier specializes in precision CNC machining for advanced robotic applications, including:
- Robot structural frames
- Actuator housings
- Joint components
- Precision shafts
- Gearbox parts
- Aluminum and titanium robotic components
- Rapid prototyping and low-volume production
- Mass production machining solutions
With advanced 3/4/5 Axis CNC machining capabilities, strict quality inspection procedures, and extensive experience in precision metal parts manufacturing, Xavier can help robotics companies accelerate product development while maintaining the reliability required for next-generation humanoid robots.
We are an integrated manufacturer and supplier specializing in CNC machining services, focusing on custom CNC machining and precision fabrication of various metal components. We also provide advanced surface finishing solutions, including CNC Anodizing Surface Finishing, CNC Electroless Nickel Plating Surface Finishing, and CNC Zinc Plating Surface Finishing.
As a professional CNC Anodizing Surface Finishing Manufacturer, we provide high-volume CNC Electroless Nickel Plating Surface Finishing Services. For competitive CNC Zinc Plating Surface Finishing Prices, please feel free to contact us.
Some of the images and text in this article are collected and compiled from the internet. If there is anything inappropriate, please contact us for processing.